
Page 50 - T50
P. 50
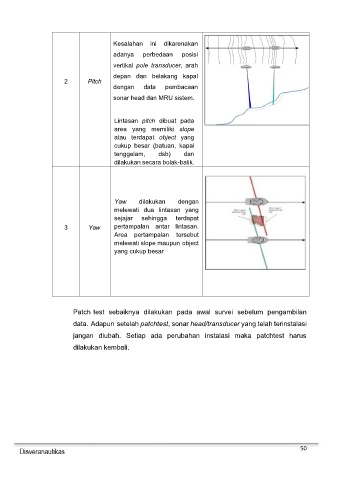
Kesalahan ini dikarenakan
adanya perbedaan posisi
vertikal pole transducer, arah
depan dan belakang kapal
2 Pitch
dengan data pembacaan
sonar head dan MRU sistem.
Lintasan pitch dibuat pada
area yang memiliki slope
atau terdapat object yang
cukup besar (batuan, kapal
tenggelam, dsb) dan
dilakukan secara bolak-balik.
Yaw dilakukan dengan
melewati dua lintasan yang
sejajar sehingga terdapat
3 Yaw pertampalan antar lintasan.
Area pertampalan tersebut
melewati slope maupun object
yang cukup besar
Patch test sebaiknya dilakukan pada awal survei sebelum pengambilan
data. Adapun setelah patchtest, sonar head/transducer yang telah terinstalasi
jangan diubah. Setiap ada perubahan instalasi maka patchtest harus
dilakukan kembali.
50